Uso del código compensado con dispositivos PIC®
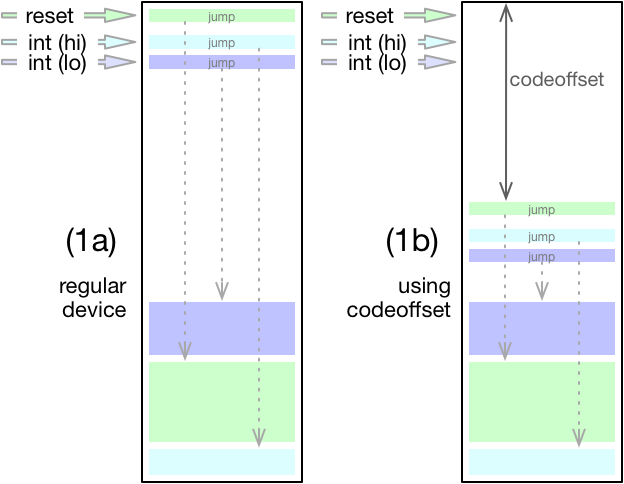
Es una práctica común cuando se escriben cargadores de arranque y aplicaciones descargables para usar la función de compensación de código del compilador MPLAB® XC8 para asegurar que el código asociado con los vectores de reinicio e interrupción esté colocado correctamente. Sin embargo, al usar dispositivos PIC18 con el controlador de interrupción vectorial (VIC), debe tomar medidas adicionales para asegurarse de que los vectores de interrupción se coloquen como se espera. En este artículo, veremos cómo controlar el restablecimiento de su código y los puntos de entrada de interrupción para cualquier dispositivo PIC® de 8 bits que use interrupciones. La figura (1a) muestra una representación simplificada de la memoria de programa de un PIC para un dispositivo PIC18 ordinario, con la dirección 0 en la parte superior. La dirección a la que se enviará el dispositivo al reiniciarse y las direcciones a las que se enviará el dispositivo en una interrupción de prioridad baja o alta se represen...